HORST
Für HORST Robotersysteme stellt SQL4automation die SQL4HORST-Bibliothek bereit, die sowohl grafische als auch textuelle Programmiermodi unterstützt. Datenbankabfragen können als einzelne Funktionen in HORST-Programme integriert werden. Ergebnisse werden in einem DataTable-Array zurückgegeben, auf das als DataTable[Zeile][Spalte] zugegriffen wird.
Anbindung HORST an SQL Datenbank, MES, ERP
SQL4HORST ermöglicht HORST-Robotern, Bewegungsdaten, Parameter und Sequenzinformationen direkt aus SQL-Datenbanken zu lesen. Ein typischer Anwendungsfall ist das Laden von Pfadpunkt-Koordinaten, Bewegungsparametern und Ausführungssequenzen aus Datenbanktabellen, wodurch Roboterprogramme aus einer zentralen Datenbank aktualisiert werden können, ohne neu programmiert zu werden. SQL4HORST_MoveExample demonstriert einen vollständigen bewegungsgesteuerten Workflow aus der Datenbank.
Einbindung der SQL4HORST Bibliothek
Der SQL4HORST Bibliothek werden Parameter wie IP-Adresse und Port des Connectors und der SQL-String übergeben. Die Rückgabewerte der SQL Abfrage werden in die Tabelle DataTable geschrieben.
Für die grafische Programmierung wird für jede Abfrage eine separate textuelle Funktion erstellt. Das Code-Snippet aus dem Beispielprojekt kopieren, IP-Adresse und Port-Variablen definieren und die Funktion aus dem grafischen Programmablauf aufrufen. Für die textuelle Programmierung das SQL4HORST-Funktions-Snippet am Ende des Programms einfügen und den Datenbankaufruf an der gewünschten Position einfügen. Ergebnisse sind in DataTable[Zeile][Spalte]; Daten bleiben verfügbar, bis die nächste Abfrage ausgeführt wird.

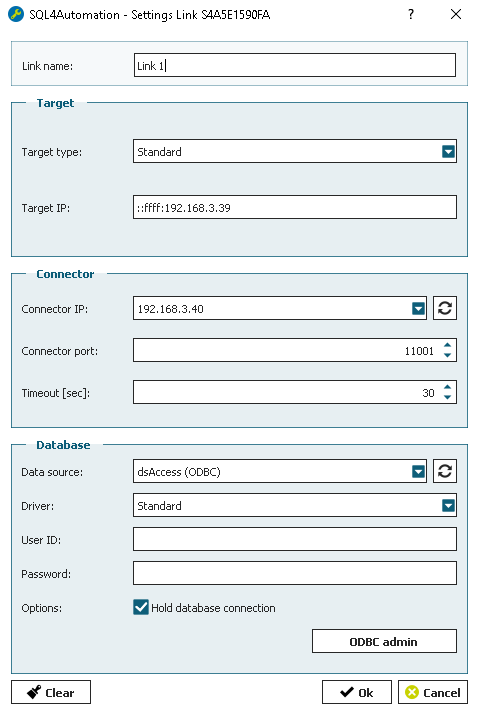
Einstellungen SQL4automation Link
Der SQL4automation Connector wird für HORST Robotersysteme mit der Zieleinstellung "Standard" betrieben. IP-Adresse und Port des Connectors werden als Variablen (IPAddress und Port) im SQL4HORST-Funktionsaufruf übergeben.
FAQ’s
Häufig gestellte Fragen zu HORST
Was ist das SQL4HORST_MoveExample und was demonstriert es?
Das SQL4HORST_MoveExample demonstriert das Lesen von Roboter-Pfaddaten aus einer MariaDB-Datenbank. Pfadpunkte (X/Y/Z-Koordinaten, Euler-Winkel, Bewegungstyp) sind in der Tabelle tPositions gespeichert. Bewegungssequenzen befinden sich in tSequences. Die Jobsteuerung liegt in tJobs. Der Roboter liest den Pfad aus der Datenbank, führt die Bewegung aus und schreibt Start-/Endzeitstempel zurück in tJobs -- ein vollständiger datenbankgesteuerter Bewegungsablauf.
Wie wird SQL4HORST im grafischen Programmiermodus integriert?
Für jede Datenbankabfrage eine separate textuelle Funktion erstellen. Innerhalb der Funktion das SQL4HORST Code-Snippet aus dem Beispielprojekt kopieren, IPAddress- und Port-Variablen definieren und die SQL-Anfrage einfügen. Dann die Funktion als Funktions-Aufruf-Aktion im grafischen Programmablauf an der gewünschten Position hinzufügen. Ergebnisse sind unmittelbar nach der Funktionsrückkehr in DataTable verfügbar.
Wie werden Integer- oder Real-Werte in eine SQL-Anfrage in HORST eingebunden?
HORST-Variablen müssen vor der Einbindung in den SQL-Befehlsstring in STRING konvertiert werden. Für die Typkonvertierung HORST-Konvertierungsfunktionen verwenden. Beispielsweise muss ein als REAL gespeicherter Motorgeschwindigkeitswert in STRING konvertiert werden, bevor er in den SQL INSERT- oder UPDATE-Befehl eingebunden werden kann.
Wie wird das DataTable-Ergebnis nach einer SQL-Abfrage in HORST abgerufen?
Ergebnisse sind in DataTable[Zeile][Spalte] verfügbar. Der erste Index (Zeile) ist die Datensatznummer (0-basiert) und der zweite Index (Spalte) ist die Feldnummer (0-basiert). Beispiel: DataTable[0][2] ist der Wert aus dem ersten Datensatz in der dritten Spalte. Daten bleiben in DataTable gespeichert, bis eine neue Abfrage ausgeführt wird.
Mit welchen SQL-Datenbanken kann ein HORST-Roboter über SQL4automation verbunden werden?
Alle ODBC-kompatiblen Datenbanken werden unterstützt, darunter Microsoft SQL Server, MySQL, MariaDB, PostgreSQL, Oracle und SQLite. Das HORST-Beispiel verwendet MariaDB, aber die Datenbankauswahl erfolgt im SQL4automation Connector und beeinflusst das HORST-Programm nicht.
Auf welchen HORST Robotersystemen wurde SQL4automation getestet?
SQL4automation wurde auf HORST Robotersystemen getestet, die sowohl grafische als auch textuelle Programmiermodi unterstützen. Das Beispielprojekt SQL4HORST_MoveExample wurde mit einer MariaDB-Datenbank entwickelt und verifiziert und demonstriert einen vollständigen bewegungsgesteuerten Workflow mit den Tabellen tPositions, tSequences und tJobs. Sowohl grafische (Funktions-Aufruf) als auch textuelle Integrationsmuster wurden bestätigt.
Technische Daten
Steigen Sie jetzt auf SQL4automation um.
Industriesteuerungen direkt mit SQL-Datenbanken verbinden. Praxiserprobt seit 2007 für maximale Leistung und Sicherheit, ganz ohne Middleware.